近日,创新创业学院HPC团队具身智能方向的两项成果被IROS 2026接收。
IROS(IEEE/RSJ International Conference on Intelligent Robots and Systems)是机器人领域最具影响力的国际顶级会议之一,也是中国自动化学会(CAA)推荐的A类国际学术会议。
成果一: 人形机器人运动追踪任务的辅助力设计
“MIWA: Marionette-Inspired Wrench Assistance Method for Effective Motion Tracking of Humanoid Robots” 被国际顶级机器人学术会议IROS 2026接收。该项成果由硕士生徐璐豪(2024级)、祝诗雨(2025级)、李光省(2024级)和刘胜蓝副教授(通讯作者)合作完成。

MIWA(Marionette-Inspired Wrench Assistance)是一种受提线木偶操控启发的模块化训练框架,旨在解决人形机器人高动态运动跟踪中早期训练不稳定、策略趋向保守以及视频参考轨迹存在漂移与抖动三大瓶颈。该方法通过PD-AW(PD-controlled Assistive Wrenches)在关键连杆上施加渐进退火的外部力/力矩以稳定早期探索,结合ART(Annealed Residual-action joint Targets)将策略输出与参考目标残差耦合以防止“安全但低保真度”的行为,并利用SW-TPD(Sliding-Window Temporal Pose Difference)以增量跟踪替代绝对位姿跟踪以增强对噪声参考的鲁棒性。在Unitree G1实体机器人上,成功跟踪了从网络视频中重定向的多样化舞蹈动作,实现了仿真到真实迁移。
成果二: 双轮足机器人在移动操作任务上的解耦运动控制
“DeLM: A Decoupled Training Framework for Wheel-Legged Bipedal Robots to Perform Loco-Manipulation Tasks Stably”被国际顶级机器人学术会议IROS 2026接收。该项成果由大连理工大学以及酷哇科技有限公司(上海)合作,基于其双轮足机器人完成,由硕士生祝诗雨(2025级)、李光省(2024级)、徐璐豪(2024级)等以及刘胜蓝副教授(通讯作者)合作完成。
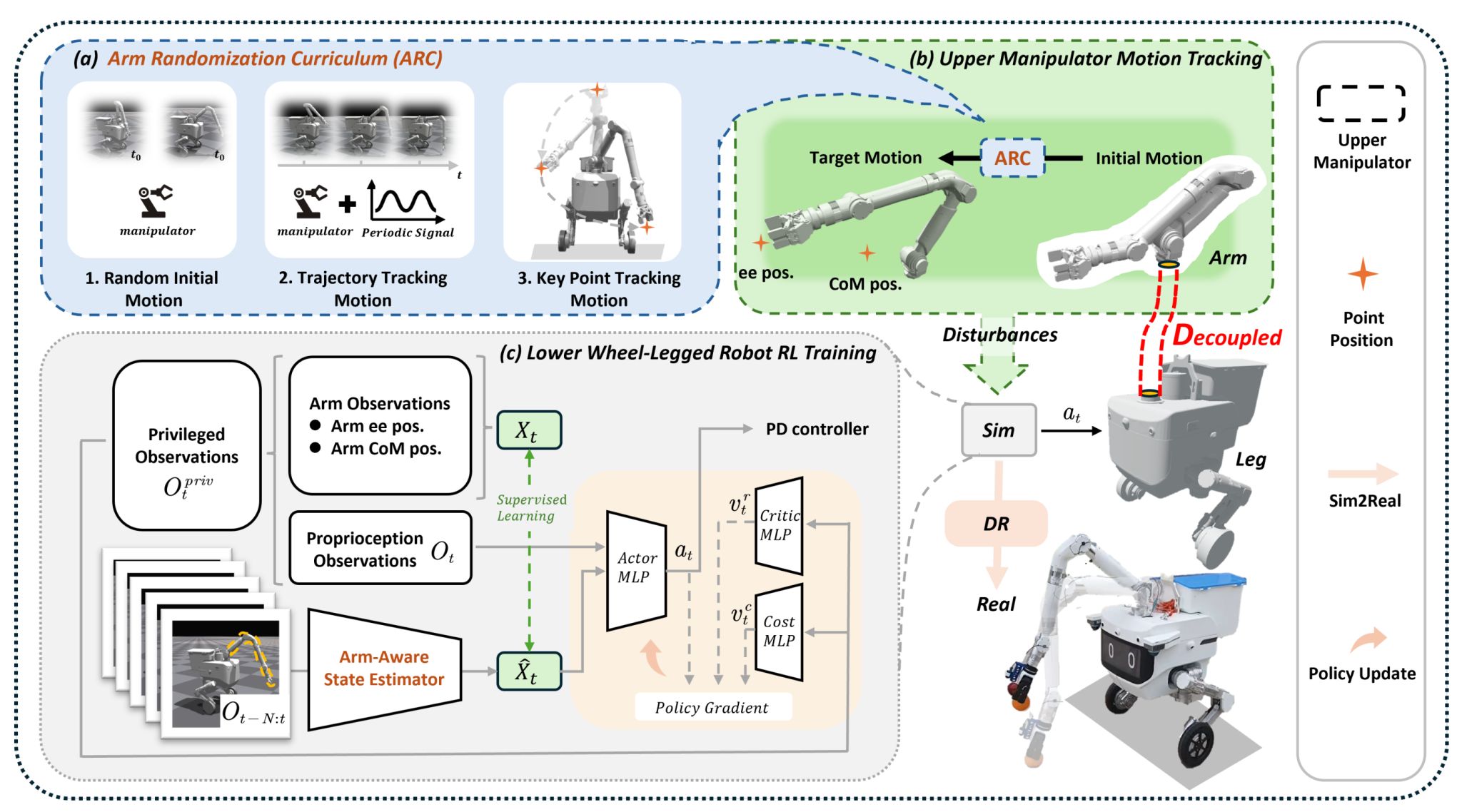
DeLM(Decoupled Loco-Manipulation)是一种面向轮腿双足机器人的解耦式移动操作训练框架,旨在解决机械臂运动引入时变扰动后,移动底盘容易产生漂移、振荡并影响抓取精度的问题。该方法将整机控制拆分为上肢机械臂任务与下肢轮腿底盘稳定控制两部分,通过ARC(Arm Randomization Curriculum)在仿真中生成随机初始姿态、连续轨迹跟踪和关键点跟踪三类机械臂运动,用结构化臂部扰动替代简单随机噪声以提升训练覆盖度;同时引入AASE(Arm-Aware State Estimator)从短时历史观测中估计机械臂质心与末端位姿隐变量,使底盘策略能够感知并补偿臂-身动态耦合。在真实机器人上实现了95%的遥操作抓取成功率和85%的VLA自主抓取成功率,验证了其在移动抓取与户外废弃物收集等任务中的稳定性与实用性。
下一条:纳新聚力逐梦科创 深耕“三早”赋能成长——创新创业学院“三早”工作坊招新工作圆满完成